mirror of
https://github.com/karma-riuk/hdr_esim.git
synced 2024-11-16 11:20:25 +01:00
46 lines
2.6 KiB
Markdown
46 lines
2.6 KiB
Markdown
# ESIM: an Open Event Camera Simulator
|
|
|
|
[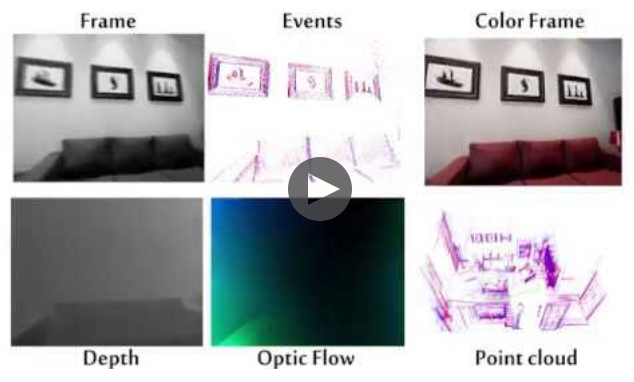](https://youtu.be/ytKOIX_2clo)
|
|
|
|
This is the code for the 2018 CoRL paper **ESIM: an Open Event Camera Simulator** by [Henri Rebecq](http://henri.rebecq.fr), [Daniel Gehrig](https://danielgehrig18.github.io/) and [Davide Scaramuzza](http://rpg.ifi.uzh.ch/people_scaramuzza.html):
|
|
```bibtex
|
|
@Article{Rebecq18corl,
|
|
author = {Henri Rebecq and Daniel Gehrig and Davide Scaramuzza},
|
|
title = {{ESIM}: an Open Event Camera Simulator},
|
|
journal = {Conf. on Robotics Learning (CoRL)},
|
|
year = 2018,
|
|
month = oct
|
|
}
|
|
```
|
|
You can find a pdf of the paper [here](http://rpg.ifi.uzh.ch/docs/CORL18_Rebecq.pdf). If you use any of this code, please cite this publication.
|
|
|
|
## Features
|
|
|
|
- Accurate event simulation, guaranteed by the tight integration between the rendering engine and the event simulator
|
|
- Inertial Measurement Unit (IMU) simulation
|
|
- Support for multi-camera systems
|
|
- Ground truth camera poses, IMU biases, angular/linear velocities, depth maps, and optic flow maps
|
|
- Support for camera distortion (only planar and panoramic renderers)
|
|
- Different C+/C- contrast thresholds
|
|
- Basic noise simulation for event cameras (based on additive Gaussian noise on the contrast threshold)
|
|
- Motion blur simulation
|
|
- Publish to ROS and/or save data to rosbag
|
|
|
|
## Install
|
|
|
|
Installation instructions can be found in [our wiki](https://github.com/uzh-rpg/rpg_esim/wiki/Installation).
|
|
|
|
## Run
|
|
|
|
Specific instructions to run the simulator depending on the chosen rendering engine can be found in [our wiki](https://github.com/uzh-rpg/rpg_esim/wiki).
|
|
|
|
## Acknowledgements
|
|
|
|
We thank Raffael Theiler and Dario Brescianini for their contributions to ESIM.
|
|
This research was supported by by Swiss National Center of Competence Research Robotics (NCCR), Qualcomm (through the Qualcomm Innovation Fellowship Award 2018), the SNSF-ERC Starting Grant and DARPA FLA.
|
|
|
|
A significant part of ESIM uses components (spline trajectories, inertial measurement unit simulation, various utility functions) from the [ze_oss](https://github.com/zurich-eye/ze_oss) project.
|
|
ESIM depends on [UnrealCV](https://github.com/unrealcv/unrealcv) for the photorealistic rendering engine.
|
|
We also reused some [code samples](https://github.com/JoeyDeVries/LearnOpenGL.git) from the excellent [Lean OpenGL](https://learnopengl.com/) tutorial in our OpenGL rendering engine.
|
|
Finally, ESIM depends on the [Open Asset Import Library (assimp)](https://github.com/assimp/assimp) to load 3D models and Blender scenes within the OpenGL rendering engine.
|